Ubuntu18.04+ROS Realsense的安装与使用-程序员宅基地
文章目录
- 前言
- 一、安装软件包与librealsense
-
- 1、内核检查
- 2、Installing the packages:
-
- 2022.11.21更新:在换了ubuntu20.04(带有)5.15的内核报错后,降级到5.3重新安装依然报错(最后解决)① 首先是sudo apt-get install librealsense2-dkms报错E: Sub-process /usr/bin/dpkg returned an error code (1),这个直接谷歌就能搜到一堆解决方案;然后sudo apt-get install librealsense2-utils报错 librealsense2-utils : 依赖: libgtk-3-dev 但是它将不会被安装,直接安装libgtk-3-dev依旧报错libgtk-3-dev : 依赖: gir1.2-gtk-3.0 (= 3.24.18-1ubuntu1) 但是 3.24.20-0ubuntu1.1 正要被安装,这里直接递归装错误的包,比如这里说需要gir1.2-gtk-3.0=3.24.18-1ubuntu1,那就sudo apt install gir1.2-gtk-3.0=3.24.18-1ubuntu1,然后再装libgtk-3-dev,再报其他错,再解决。。。最终装上了。
- 可以用aptitude来解决这个依赖问题
- 二、ROS
- 总结
前言
本来觉得realsense的使用是挺简单的一回事(事实证明确实简单…),但想着之后自己可能还会多次进行配置,还是记录一下,方便以后查阅
一、安装软件包与librealsense
完全可以照着官方linux安装教程进行安装。以下几乎仅为翻译:(在安装时应断开realsense的连接)
1、内核检查
realsense DKMS kernel drivers package(就是后面需要安装的librealsense2-dkms),支持的Ubuntu LTS内核版本有:4.4, 4.8, 4.10, 4.13, 4.15, 4.18*, 5.0*, 5.3* and 5.4。可以通过 uname -r查看自己电脑内核版本,如我的为5.4.0-67-generic。
2、Installing the packages:
- 注册服务器公开密匙:(如果失败可以尝试终端使用代理再尝试)
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- 将服务器加入仓库列表
Ubuntu 16 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo xenial main" -u
Ubuntu 18 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
Ubuntu 20 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo focal main" -u
- 库安装
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
上面两行将部署librealsense2 udev规则,构建和激活内核模块,运行时库以及可执行的演示和工具。
2022.11.21更新:在换了ubuntu20.04(带有)5.15的内核报错后,降级到5.3重新安装依然报错(最后解决)① 首先是sudo apt-get install librealsense2-dkms报错E: Sub-process /usr/bin/dpkg returned an error code (1),这个直接谷歌就能搜到一堆解决方案;然后sudo apt-get install librealsense2-utils报错 librealsense2-utils : 依赖: libgtk-3-dev 但是它将不会被安装,直接安装libgtk-3-dev依旧报错libgtk-3-dev : 依赖: gir1.2-gtk-3.0 (= 3.24.18-1ubuntu1) 但是 3.24.20-0ubuntu1.1 正要被安装,这里直接递归装错误的包,比如这里说需要gir1.2-gtk-3.0=3.24.18-1ubuntu1,那就sudo apt install gir1.2-gtk-3.0=3.24.18-1ubuntu1,然后再装libgtk-3-dev,再报其他错,再解决。。。最终装上了。
可以用aptitude来解决这个依赖问题
-
验证:连接realsense,终端输入realsense-viewer即可;也可再验证,终端输入modinfo uvcvideo | grep “version:”,返回的命令中应该包含“realsense”。
-
包升级与卸载
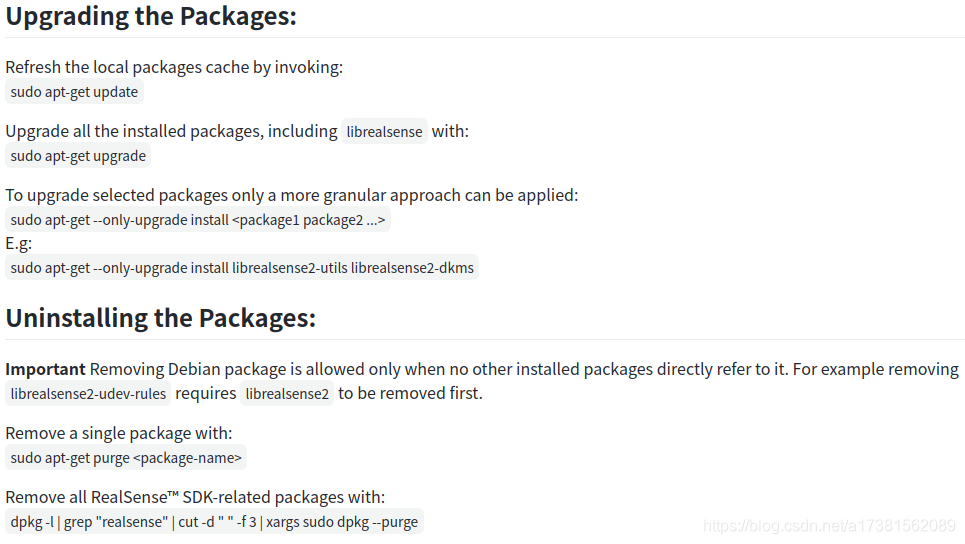
-
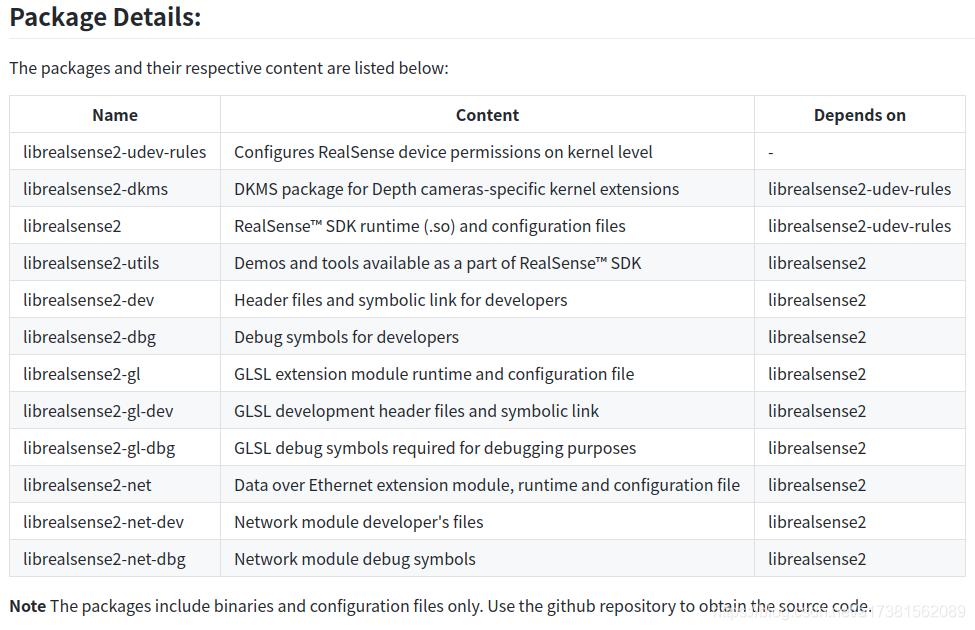
包细节
二、ROS
这一部分也有官网的参考安装,也是照着做就可以
1、包安装
采用的是官网的Method1方式,这种方式的坏处是安装的包会在/opt/ros/melodic/share/realsense2_camera路径下,并非自己的catkin_ws。使用Method2的方式可以git到自定义工作空间。推荐Method2
Method1
sudo apt-get install ros-melodic-realsense2-camera
sudo apt-get install ros-melodic-realsense2-description
Method2
首先安装之前可选安装的库,再git realsense2-ros到catkin_ws的src中,无脑catkin_make就ok。
sudo apt-get install librealsense2-dev
2、使用
- 获取/camera/depth/color/points
通过以下指令就将所有相机的所有相关信息通过ros topic的方式发布出去了
roslaunch realsense2_camera rs_camera.launch
也可通过下面命令直接查看点云信息
roslaunch realsense2_camera demo_pointcloud.launch
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
-
获取/camera/depth_registered/points
这里还需要ros的一个驱动包:git clone https://github.com/ros-drivers/rgbd_launch.git之后将rs_rgbd.launch和rs_camera.launch文件中的arg name=“enable_pointcloud” default="true"由false改为true(这一步可以获得/camera/depth/color/points),运行:
roslaunch realsense2_camera rs_rgbd.launch
这里还不太清楚这两个topic之间的差别,前者也是registered后得到的点吗?希望有大佬能够解答,也先挖个坑,以后再填。
补:
自己琢磨了半天,大致想清楚camera/depth/color/points和camera/depth_registered/points之间的区别了——:
- 首先前者camera/depth/color/points的获取方式为,利用针孔成像模型和相机的内参(焦距、光心距等),逐深度图得到点云,再按同样的方式逐彩色图将RGB信息赋予点云。参考https://blog.csdn.net/qq_43176116/article/details/93878513,里面的程序很好的说明了这一点

- 后者camera/depth_registered/points首先要做的工作就是将3D相机产生的深度图像(depth image)配准(registration),以生成配准深度图像(registed depth image)。实际上配准的目的就是想让深度图和彩色图重合在一起,即是将深度图像的图像坐标系转换到彩色图像的图像坐标系下。配准前后的对比:

参考:
https://blog.csdn.net/aichipmunk/article/details/9264703
https://www.cnblogs.com/cv-pr/p/5769617.html
如果有理解的不对的地方还望各位大佬指证,有更好的证明例子也欢迎告诉我,谢谢大噶~
还有很多参数设置(特别是filters)还需要熟悉,目前就不再深究了,能得到点云信息就Ok了
总结
还以为有多难呢,就这?
智能推荐
Word插件开发
创建一个新的 Office 插件项目:在 Visual Studio 中,选择"文件" -> “新建项目”,然后在模板中选择"Office/SharePoint",选择适当的 Office 插件项目模板,如 Word 插件、Excel 插件或 PowerPoint 插件。设计用户界面:在解决方案资源管理器中,打开你的插件项目,并在其中打开相应的 Office 文件(如 Word 文件、Excel 文件或 PowerPoint 文件)。你可以在 Office 应用中测试插件的功能,并在开发过程中进行调试。
便携式iv检测仪解析
在应用场景方面,便携式IV功率测试仪广泛应用于光伏电站的日常运维、光伏组件生产过程中的质量控制以及光伏项目的前期评估等环节。在光伏电站运维中,定期对光伏组件进行IV测试,可以及时发现性能下降或损坏的组件,为电站的运维提供有力支持。首先,从工作原理来看,光伏电站便携式IV功率测试仪通过模拟太阳光照射光伏组件,并测量组件在不同电压下的电流输出,从而绘制出IV曲线。此外,测试仪还可以计算光伏组件的功率输出、转换效率等参数,为用户提供全面的性能评估。
postgresql 索引之 hash_load_categories_hash postgres-程序员宅基地
文章浏览阅读3.6k次。os: ubuntu 16.04postgresql: 9.6.8ip 规划192.168.56.102 node2 postgresqlhelp create indexpostgres=# \h create indexCommand: CREATE INDEXDescription: define a new indexSyntax:CREATE [ UNIQUE ..._load_categories_hash postgres
face++实现人脸识别及人脸相似度对比_face++人脸识别 html5-程序员宅基地
文章浏览阅读4.8k次。使用face++,先获取key和secret下方是人脸识别,还添加了画出人脸轮廓的正方形下方是人脸识别,还添加了画出人脸轮廓的正方形 import requests#网络访问控件 from json import JSONDecoder#互联网数据交换标准格式 import cv2 as cv#图像处理控件 http_url ="https://a..._face++人脸识别 html5
desencrypt java md5_Java实现DES加密与解密,md5加密以及Java实现MD5加密解密类-程序员宅基地
文章浏览阅读322次。很多时候要对秘要进行持久化加密,此时的加密采用md5。采用对称加密的时候就采用DES方法了import java.io.IOException;import java.security.MessageDigest;import java.security.SecureRandom;import javax.crypto.Cipher;import javax.crypto.SecretKey;im..._java desencrypt.encrypt(pass)
BZOJ 2818 欧拉函数,线性筛_线性筛预处理质数表, 并求出欧拉函数, 预处理前缀和即可 bzoj2818boj-程序员宅基地
文章浏览阅读145次。题目链接:https://www.acwing.com/problem/content/description/222/给定整数N,求1<=x,y<=N且GCD(x,y)为素数的数对(x,y)有多少对。GCD(x,y)即求x,y的最大公约数。输入格式输入一个整数N输出格式输出一个整数,表示满足条件的数对数量。数据范围1≤N≤10^7输入样例:4..._线性筛预处理质数表, 并求出欧拉函数, 预处理前缀和即可 bzoj2818boj
随便推点
Lane Detection_lanedetectionlite-程序员宅基地
文章浏览阅读1.2k次。fromhttps://towardsdatascience.com/finding-lane-lines-simple-pipeline-for-lane-detection-d02b62e7572bIdentifying lanes of the road is very common task that human driver performs. This is important ..._lanedetectionlite
【数据结构】静态表查找之顺序查找、二分查找、分块查找_读取表元是什么意思-程序员宅基地
文章浏览阅读4.1k次,点赞8次,收藏23次。通过一定的方法找出与给定关键字相同的数据元素的过程叫做查找。也就是根据给定的某个值,在查找表中确定一个关键字等于给定值的记录或数据元素。_读取表元是什么意思
如何设置交易滑点?精确到tick 测算期货冲击成本(附源码)_滑点设置多少合适-程序员宅基地
文章浏览阅读8.3k次,点赞4次,收藏18次。我们在非撮合回测模式下,因为无法获知交易价格当时的真实盘口价差、挂单数量,常主观设定一个滑点均值,比如针对螺纹钢等合约,设置 1 跳,针对某些交易不活跃的品种,设置 2 跳。但是这种近乎拍脑袋的方法并不精确。我们今天尝试通过简单的辅助工具,实现尽可能接近准确的 tick 级别滑点设置,代码已写好,不用编程也可获得结果。_滑点设置多少合适
大数据技术之 Azkaban_azkaban要建立job之间的依赖关系需要使用-程序员宅基地
文章浏览阅读551次。尚硅谷大数据技术之 Azkaban—————————————————————————————更多 Java –大数据 –前端 –python 人工智能资料下载,可百度访问:尚硅谷官网尚硅谷大数据技术之 Azkaban(作者:尚硅谷大数据研发部)版本:V3.0一 概述1.1 什么是 AzkabanAzkaban 是由 Linkedin 公司推出的一个批量工作流任务调度器,主要用于在一个工作流内以一个特定的顺序运行一组工作和流程,它的配置是通过简单的 key:value 对的方式,通过配置中_azkaban要建立job之间的依赖关系需要使用
python批量修改文件编码格式,由utf-16 le 格式转为utf-8_utf16le转换utf8-程序员宅基地
文章浏览阅读5k次,点赞2次,收藏9次。#! python3# encoding: utf-8import osimport chardetdef strJudgeCode(str1): return chardet.detect(str1)"""def readFile(path): with open(path,'r',encoding='utf-16 le') as f: filecontent ..._utf16le转换utf8
android:AppWidget 窗口小部件的开发思想和Demo_安卓小部件开发demo-程序员宅基地
文章浏览阅读1.1k次。AppWidget 窗口小部件的开发思想和Demo 这篇文章讲一下android系统“窗口小部件”(也叫做,主屏幕部件)的开发过程。什么叫窗口小部件呢?是指在主屏幕上显示的独立视图(不过填充了数据)。这些视图的数据内容由后台进程顶起更新。要用到RemoteViews来显示部件,还要指派广播接收器更新这些RemoteViews. 既可以单独做个窗口小部件,也可在App中嵌入多个窗口小部_安卓小部件开发demo