图像频率域分析之傅里叶变换_研究傅里叶时域图像时频率是不变的吗-程序员宅基地
技术标签: 计算机视觉 图像处理 Computer Vision
Overview
欢迎访问 持续更新:https://cgabc.xyz/posts/bcb5a7d3/
傅里叶变换基础
傅里叶级数
法国数学家傅里叶发现,任何周期函数都可以用正弦函数和余弦函数构成的无穷级数来表示(选择正弦函数与余弦函数作为基函数是因为它们是正交的),即 任何周期信号都可以表示成一系列正弦信号的叠加
- 三角形式
f ( t ) = a 0 2 + ∑ k = 1 + ∞ [ a k c o s ( n ω t ) + b k s i n ( n ω t ) ] , a 0 2 = 1 T ∫ − T 2 T 2 f ( t ) d t f(t) = \frac{a_0}{2} + \sum_{k=1}^{+\infty} \big[ a_k cos (n \omega t) + b_k sin (n \omega t) \big], \quad \frac{a_0}{2} = \frac{1}{T} \int_{-\frac{T}{2}}^{\frac{T}{2}} f(t) dt f(t)=2a0+k=1∑+∞[akcos(nωt)+bksin(nωt)],2a0=T1∫−2T2Tf(t)dt
- 复指数形式
f ( t ) = 1 T ∑ n = − ∞ + ∞ [ ∫ − T 2 T 2 f ( τ ) e − j ω n τ d τ ] e j ω n t f(t) = \frac{1}{T} \sum_{n=-\infty}^{+\infty} [ \int_{-\frac{T}{2}}^{\frac{T}{2}} f(\tau)e^{-j\omega_n\tau} d\tau ] e^{j\omega_nt} f(t)=T1n=−∞∑+∞[∫−2T2Tf(τ)e−jωnτdτ]ejωnt
基波角频率 ω = 2 π T \omega = \frac{2\pi}{T} ω=T2π , T T T 为 f ( t ) f(t) f(t) 的周期, j j j 为虚数单位
傅里叶积分
复指数形式
f ( t ) = 1 2 π ∫ − ∞ + ∞ [ ∫ − ∞ + ∞ f ( τ ) e − j ω τ d τ ] e j ω t d ω f(t) = \frac{1}{2\pi} \int_{-\infty}^{+\infty} [ \int_{-\infty}^{+\infty} f(\tau)e^{-j\omega\tau} d\tau ] e^{j\omega t} d\omega f(t)=2π1∫−∞+∞[∫−∞+∞f(τ)e−jωτdτ]ejωtdω
傅里叶变换
一维连续傅里叶变换
正变换 为
F ( ω ) = ∫ − ∞ + ∞ f ( t ) e − j ω t d t F(\omega) = \int_{-\infty}^{+\infty} f(t) e^{-j\omega t} dt F(ω)=∫−∞+∞f(t)e−jωtdt
逆变换 为
f ( t ) = 1 2 π ∫ − ∞ + ∞ F ( ω ) e j ω t d ω f(t) = \frac{1}{2\pi} \int_{-\infty}^{+\infty} F(\omega) e^{j\omega t} d\omega f(t)=2π1∫−∞+∞F(ω)ejωtdω
一维离散傅里叶变换
正变换 为
F ( u ) = ∑ x = 0 M − 1 f ( x ) e − j 2 π u x M F(u) = \sum_{x=0}^{M-1} f(x) e^{-j2\pi \frac{ux}{M}} F(u)=x=0∑M−1f(x)e−j2πMux
则
F ( 0 ) = ∑ x = 0 M − 1 f ( x ) F(0) = \sum_{x=0}^{M-1} f(x) F(0)=x=0∑M−1f(x)
反变换 为
f ( x ) = 1 M ∑ u = 0 M − 1 F ( u ) e j 2 π u x M f(x) = \frac{1}{M} \sum_{u=0}^{M-1} F(u) e^{j2\pi \frac{ux}{M}} f(x)=M1u=0∑M−1F(u)ej2πMux
对于反变换式前的系数 1 M \frac{1}{M} M1 ,也可放在正变换中,只要保证正变换与反变换之前的系数乘积为 1 M \frac{1}{M} M1 即可。
二维离散傅里叶变换
正变换
二维离散傅里叶变换:
F [ f ( x , y ) ] = F ( u , v ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) e − j 2 π ( u x M + v y N ) F[f(x,y)] = F(u,v) = \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x,y) e^{-j2\pi(\frac{ux}{M}+\frac{vy}{N})} F[f(x,y)]=F(u,v)=x=0∑M−1y=0∑N−1f(x,y)e−j2π(Mux+Nvy)
当 ( u , v ) (u,v) (u,v) 等于 ( 0 , 0 ) (0,0) (0,0) 时,直流分量 为:
F ( 0 , 0 ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) F(0,0) = \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x,y) F(0,0)=x=0∑M−1y=0∑N−1f(x,y)
幅度谱 为:
A ( u , v ) = ∣ F ( u , v ) ∣ = R e a l ( u , v ) 2 + I m a g e ( u , u ) 2 A(u,v) = |F(u,v)| = \sqrt{Real(u,v)^2 + Image(u,u)^2} A(u,v)=∣F(u,v)∣=Real(u,v)2+Image(u,u)2
功率谱 为:
P ( u , v ) = ∣ F ( u , v ) ∣ 2 = R e a l ( u , v ) 2 + I m a g e ( u , u ) 2 P(u,v) = |F(u,v)|^{2} = Real(u,v)^2 + Image(u,u)^2 P(u,v)=∣F(u,v)∣2=Real(u,v)2+Image(u,u)2
相位谱 为:
ϕ ( u , v ) = a r c t a n I m a g e ( u , v ) R e a l ( u , v ) \phi(u,v) = arctan \frac{Image(u,v)}{Real(u,v)} ϕ(u,v)=arctanReal(u,v)Image(u,v)
通过 幅度谱 和 相位谱,我们也能合成 其傅里叶变换(频谱):
F ( u , v ) = A ( u , v ) e j ϕ ( u , v ) = A ( c o s ϕ + j s i n ϕ ) (省略(u,v),应用 欧拉公式) = A c o s ϕ + j A s i n ϕ \begin{aligned} F(u,v) &= A(u,v)e^{j\phi(u,v)} \\ &= A( cos \phi + jsin \phi ) \quad \text{(省略(u,v),应用 欧拉公式)}\\ &= Acos\phi + jAsin\phi \end{aligned} F(u,v)=A(u,v)ejϕ(u,v)=A(cosϕ+jsinϕ)(省略(u,v),应用 欧拉公式)=Acosϕ+jAsinϕ
注意:
- 上面式子中的 j j j 为 虚数单位
- R e a l ( u , v ) Real(u,v) Real(u,v) 为 复数的 实部
- I m a g e ( u , v ) Image(u,v) Image(u,v) 为 复数的 虚部
反变换
f ( x , y ) = F − 1 ( u , v ) = 1 M N ∑ u = 0 M − 1 ∑ v = 0 N − 1 F ( u , v ) e j 2 π ( u x M + v y N ) f(x,y) = F^{-1}(u,v) = \frac{1}{MN} \sum_{u=0}^{M-1} \sum_{v=0}^{N-1} F(u,v) e^{j2\pi(\frac{ux}{M}+\frac{vy}{N})} f(x,y)=F−1(u,v)=MN1u=0∑M−1v=0∑N−1F(u,v)ej2π(Mux+Nvy)
卷积
∫ − ∞ + ∞ f 1 ( τ ) f 2 ( t − τ ) d τ = f 1 ( t ) ∗ f 2 ( t ) \int_{-\infty}^{+\infty} f_1(\tau)f_2(t-\tau) d\tau = f_1(t) * f_2(t) ∫−∞+∞f1(τ)f2(t−τ)dτ=f1(t)∗f2(t)
卷积定理
函数卷积的傅立叶变换是函数傅立叶变换的乘积
- 时域卷积定理:时域内的卷积对应频域内的乘积
F [ f 1 ( t ) ∗ f 2 ( t ) ] = F 1 ( ω ) ⋅ F 2 ( ω ) F[f_1(t) * f_2(t)] = F_1(\omega) \cdot F_2(\omega) F[f1(t)∗f2(t)]=F1(ω)⋅F2(ω)
- 频域卷积定理:频域内的卷积对应时域内的乘积
F [ f 1 ( t ) ⋅ f 2 ( t ) ] = 1 2 π F 1 ( ω ) ∗ F 2 ( ω ) F[f_1(t) \cdot f_2(t)] = \frac{1}{2\pi} F_1(\omega) * F_2(\omega) F[f1(t)⋅f2(t)]=2π1F1(ω)∗F2(ω)
数字图像DFT
借用知乎大神Heinrich的一张图,来个感性认识:
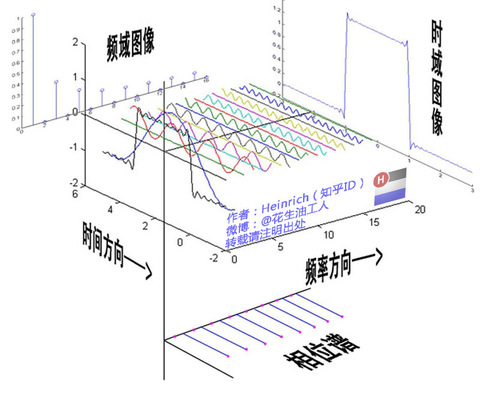
空间域和频域
- 空间域:在图像处理中,时域可以理解为 空间域 或者 图像空间,处理对象为图像像元;
- 频域:以 空间频率 为自变量描述图像的特征,可以将一幅图像像元值在空间上的变化分解为具有不同振幅、空间频率和相位的简振函数的线性叠加,图像中各种空间频率成分的组成和分布称为 图像频谱
空间域与频域可互相转换,对图像施行 二维离散傅立叶变换 或 小波变换 ,可以将图像由空间域转换到频域;通过 对应的反变换 又可转换回空间域图像,即人可以直接识别的图像。
图像频域滤波
二维数字图像的滤波主要分为 空间域滤波 和 频域滤波:
-
空间域滤波: 用各种模板直接与图像进行 卷积运算,实现对图像的处理,这种方法直接对图像空间操作,操作简单
-
频域滤波: 在实现某些图像处理的时候,频域的处理比空间域更简单;对于在空间域上的数字图像,根据 卷积定理 可以通过 傅立叶变换 将 空域卷积滤波 变换为 频域滤波,然后再将频域滤波处理后的图像 反变换 回空间域
基本步骤
图像频域滤波步骤为(频谱图中心化):
- 计算 原始图像 f ( x , y ) f(x,y) f(x,y) 的DFT,得到 频谱 F ( u , v ) F(u,v) F(u,v)
- 中心化:将频谱 F ( u , v ) F(u,v) F(u,v) 的零频点移动到频谱图的中心位置
- 计算 滤波器函数 H ( u , v ) H(u,v) H(u,v) 与 F ( u , v ) F(u,v) F(u,v) 的乘积 G ( u , v ) = F ( u , v ) ⋅ H ( u , v ) G(u,v) = F(u,v) \cdot H(u,v) G(u,v)=F(u,v)⋅H(u,v)
- 反中心化:将频谱 G ( u , v ) G(u,v) G(u,v) 的零频点移回到频谱图的左上角位置
- 计算上一步计算结果的 傅里叶反变换 g ( x , y ) g(x,y) g(x,y)
- 取 g ( x , y ) g(x,y) g(x,y) 的 实部 作为最终滤波后的结果图像
上面步骤是对 图像频谱 进行 中心变换;我们也可以先对 原始图像 进行 中心变换,再计算其 频谱图,滤波步骤如下(原始图中心化):
- 原始图像 f ( x , y ) f(x,y) f(x,y) 中心变换: f ( x , y ) ⋅ ( − 1 ) ( x + y ) f(x,y) \cdot (-1)^{(x+y)} f(x,y)⋅(−1)(x+y)
- 计算上一步计算结果的DFT,得到其 频谱 F ( u , v ) F(u,v) F(u,v)
- 计算 滤波器函数 H ( u , v ) H(u,v) H(u,v) 与 F ( u , v ) F(u,v) F(u,v) 的乘积 G ( u , v ) = F ( u , v ) ⋅ H ( u , v ) G(u,v) = F(u,v) \cdot H(u,v) G(u,v)=F(u,v)⋅H(u,v)
- 计算 G ( u , v ) G(u,v) G(u,v) 的 傅里叶反变换 g ( x , y ) g(x,y) g(x,y)
- 取 g ( x , y ) g(x,y) g(x,y) 的 实部
- 上一步计算结果 乘以 ( − 1 ) ( x + y ) (-1)^{(x+y)} (−1)(x+y) 作为最终滤波后的结果图像
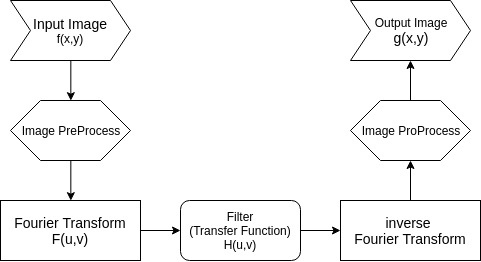
滤波能否取得理想结果的关键取决于上面的 滤波器函数 H ( u , v ) H(u,v) H(u,v) 。
这时让我想到了《自动控制理论》中的 传递函数 G ( s ) G(s) G(s),定义为:初始条件为零的线性定常系统输出的拉普拉斯变换与输入的拉普拉斯变换之比。
下面以 控制论的思想 给出图像频域滤波的示意框图:
图像频率特性分析
频谱图上的每一个像素点都代表一个频率值,幅值由像素点亮度变码而得。对于一幅图像,图像信号的 频率特性 如下:
- 直流分量 表示预想的平均灰度
- 低频分量 代表了大面积背景区域和缓慢变化部分
- 高频分量 代表了它的边缘、细节、跳跃部分以及颗粒噪声
- 振幅 描述了图像灰度的亮度
- 相位 决定了图像是什么样子
数字图像的二维离散傅立叶变换所得的结果的频域成分如下图所示,左上角是直流成分,变换结果四个角周围对应于低频成分,中央部分对应于高频部分
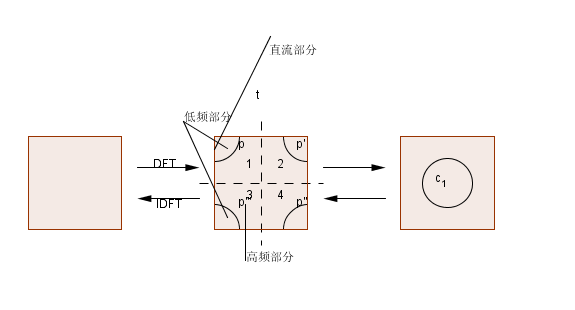
为了便于观察,常常采取 换位 方法使直流成分出现在窗口的中央(中心化),变换后中心为低频,向外是高频。
在频域,可以很方便的实现 图像的锐化和模糊:
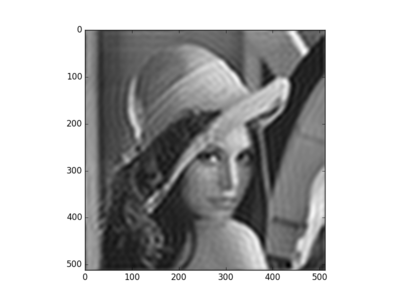
- 截取频率的低频分量,对其作傅立叶反变换,得到的就是模糊后的图像,即 低通滤波
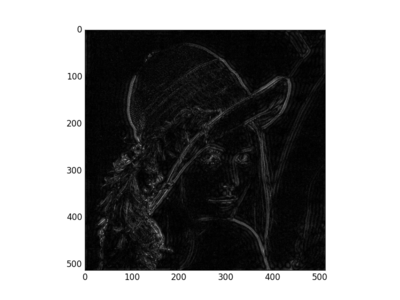
- 截取频率的高频分量,对其作傅立叶反变换,得到的就是锐化后的图像,即 高通滤波
图像滤波实践
下面,我们以 lena.bmp(点此下载) 图像进行滤波实践。
{kind=link}
Python分析
(1)加载图像,并转换为 灰度图 为
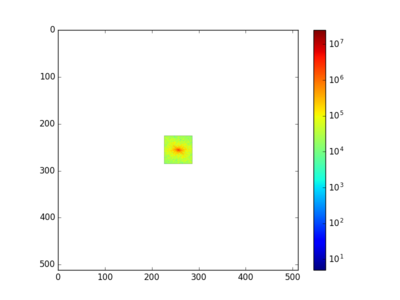
(2)对其 快速傅里叶变换,并经过 中心变换,得到 频率谱 和 相位谱

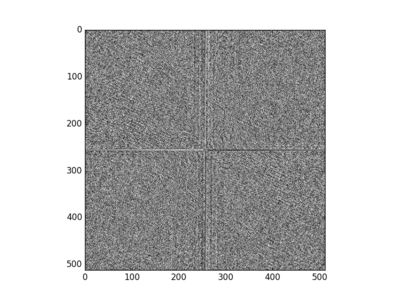
(3)分别截取 频谱图 的 低频部分(中间部分) 和 高频分量(四周部分)

(4)对以上处理过的频谱图分别进行 反中心化、傅里叶反变换、取实部,得到 低通滤波 和 高通滤波 后的图像
C++分析
使用 CImg 和 FFTW库 对 lena图像进行傅里叶变换(源代码见文末),结果如下

源代码
以上所有代码均存储在我的Github仓库:
- Python Code: cggos/cgocv_app/cv_py
- C++ Code: cggos/cgocv_app/image_process/fftw_demos
参考资料
智能推荐
如何把自己的驱动编译进内核或模块(Kconfig和Makefile)_nvp6324 驱动-程序员宅基地
文章浏览阅读905次。本说明以NVP6324为例。1、首先在drivers\media\i2c中修改Kconfig和Makefile,如下: 在Kconfig中添加如下:config VIDEO_NVP6324 tristate "NVP6324 AHD sensor support" depends on I2C ---help--- This is a V4L2 sensor-le..._nvp6324 驱动
自适应直方图均衡(CLAHE) 代码及详细注释【OpenCV】_自适应双平台直方图均衡算法代码-程序员宅基地
文章浏览阅读2.7w次,点赞9次,收藏80次。理论请参考博客OpenCV源码的本地路径: %OPENCV%\opencv\sources\modules\imgproc\src\clahe.cppclahe.cpp// ----------------------------------------------------------------------// CLAHEnamespace{ class C_自适应双平台直方图均衡算法代码
计算机视觉及其图像处理操作-程序员宅基地
文章浏览阅读3.1k次,点赞3次,收藏22次。点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达作者丨吃猫的鱼python @CSDN编辑丨3D视觉开发者社区目录content一、什么是计算机视觉二、图片处理基础操作图片处理:读入图像图片处理:显示图像图片处理:图像保存三、图像处理入门基础图像成像原理介绍图像分类四、像素处理操作读取像素修改像素使用python中的numpy修改像素点五、获取图像属性形状像素数目图像类型六..._计算机视觉与图像处理
欠拟合、过拟合现象,及解决办法_svm过拟合怎么解决-程序员宅基地
文章浏览阅读7.4k次,点赞6次,收藏112次。@创建于:2022.05.27@修改于:2022.05.27文章目录1、过拟合与欠拟合2、欠拟合2.1 出现的原因2.2 解决的办法3、过拟合3.1 出现的原因3.2 解决的办法4. Early stopping5、Dropout6、L1 和 L2 正则化7、参考资料1、过拟合与欠拟合机器学习中模型的泛化能力强的模型才是好模型。对于训练好的模型:若在训练集表现差,不必说在测试集表现同样会很差,这可能是欠拟合导致;若模型在训练集表现非常好,却在测试集上差强人意,则这便是过拟合导致的。过拟合_svm过拟合怎么解决
go上传文件-程序员宅基地
文章浏览阅读102次。【代码】go上传文件。
【转】目前常用AD/DA芯片简介_分辨率0.5的ad芯片-程序员宅基地
文章浏览阅读2.9k次。_分辨率0.5的ad芯片
随便推点
成为JavaGC专家Part II:如何监控Java垃圾回收机制-程序员宅基地
文章浏览阅读215次。 成为JavaGC专家Part II :如何监控Java垃圾回收机制 本文是成为Java GC专家系列文章的第二篇。在第一篇《深入浅出Java垃圾回收机制》中我们学习了不同GC算法的执行过程,GC是如何工作的,什么是新生代和老年代,你应该了解的JDK7中的5种GC类型,以及这5种类型对于应用性能的影响。 在本文中,我将解释JVM到底是如何执行垃圾回收处理..._成为javagc专家part ii — 如何监控java垃圾回收机制。
python学习导航线_python点线导航-程序员宅基地
文章浏览阅读122次。文章目录python学习导航线一、seleniumpython-selenium二、python基础知识python的聊天室python学习导航线一、seleniumpython-selenium二、python基础知识python的聊天室_python点线导航
静态成员-静态成员变量-程序员宅基地
文章浏览阅读3.4k次,点赞4次,收藏22次。静态成员静态成员都是用static修饰,它的特点是不论创建多少个对象,程序都只创建一个静态成员。最主要的特点:共享什么是共享呢?例如:统计超市中所有商品数量的总和,商品数量的总和是随着每一个数量的变化而变化的,这是我们就可以用静态成员处理。(代码下面有写)静态成员又分为静态成员变量和静态成员函数。(一)静态成员变量特点:1、所有对象共享一份数据。 2、在编译阶段分配内存。 3、类内声明,类外初始化。#include<io..._静态成员变量
HTML5七夕情人节表白网页制作【情人节满屏爱心HTML5特效】HTML+CSS+JavaScript html生日快乐祝福网页制作_html 满屏爱心-程序员宅基地
文章浏览阅读879次,点赞21次,收藏20次。1 网页简介:基于HTML+CSS+JavaScript 制作七夕情人节表白网页、生日祝福、七夕告白、 求婚、浪漫爱情3D相册、炫酷代码,快来制作一款高端的表白网页送(他/她)浪漫的告白,制作修改简单,可自行更换背景音乐,文字和图片即可使用等任意html编辑软件进行运行及修改编辑等操作)。_html 满屏爱心
【易飞】易飞ERP自动审核程序功能_易飞单据审批设置-程序员宅基地
文章浏览阅读492次,点赞9次,收藏5次。【代码】【易飞】易飞ERP自动审核程序功能。_易飞单据审批设置
青少年CTF擂台挑战赛 2024 #Round 1_xyctf高校新生联合赛 2024-程序员宅基地
文章浏览阅读1.6k次,点赞15次,收藏30次。文件打开是一个print数组v4的地址和read函数,并且nx好像可写,输入长度可以利用,进行一个栈上写好自己的shell,然后在构造一个回到v4的地址,这样子就可以重新读取到写buf段上的shell,这里要注意shell的隔断用/00截断然后构造好栈上数据。一个sql注入题目,尝试使用二分查找,但只能爆出表名和列名,值一直出不来,后来采用布尔盲注,fuzz测试后发现没有加任何过滤,直接写脚本。第二题:为了求解方程 (5 + sqrt{x} = 8),我们可以分离平方根项,然后求解 (x)。_xyctf高校新生联合赛 2024